Tip
Check out:
our DEMO system
our Video tutorials
our GitHub sponsors => a way of supporting the project
Warning
Documentation is not yet finished.
Output
Description
Here you can find information to the implementation and maintenance of output-devices.
Note
Only devices we tested are listed here.
If you have tested some on your own and want to contribute your know-how => send us the information to contact@growautomation.eu
Please include at least the information you see listed in the existing devices below.
Devices
L298N Motor driver
A bi-directional (forward and reverse) motor driver.
Can per example be used for:
Windows openers => using a linear actuator
Links
Amazon ‘Linear Actuator’ (window opener)
Dependencies
privileges
executing user must be a member of:
group gpio (usermod -a -G gpio USERNAME)
Config
Device model
Script: L298N.py
Script argument: forward
Reverse script argument: reverse
Reverse type: condition or time
Reverse after: if the reverse type is ‘time’ you need to specify an active time in seconds
Device
Connection: ga_json[fwd=GPIO_PIN,rev=GPIO_PIN,time=SECONDS]
Implementation
The ‘IN’ pins are used to check in which direction the motor should be turned.
Their voltage is compared to the one applied to the ‘EN’ pin to get the output voltage:
OUTPUT-VOLTAGE = INPUT-VOLTAGE * ( INx-VOLTAGE / ENx-VOLTAGE )
Wiring
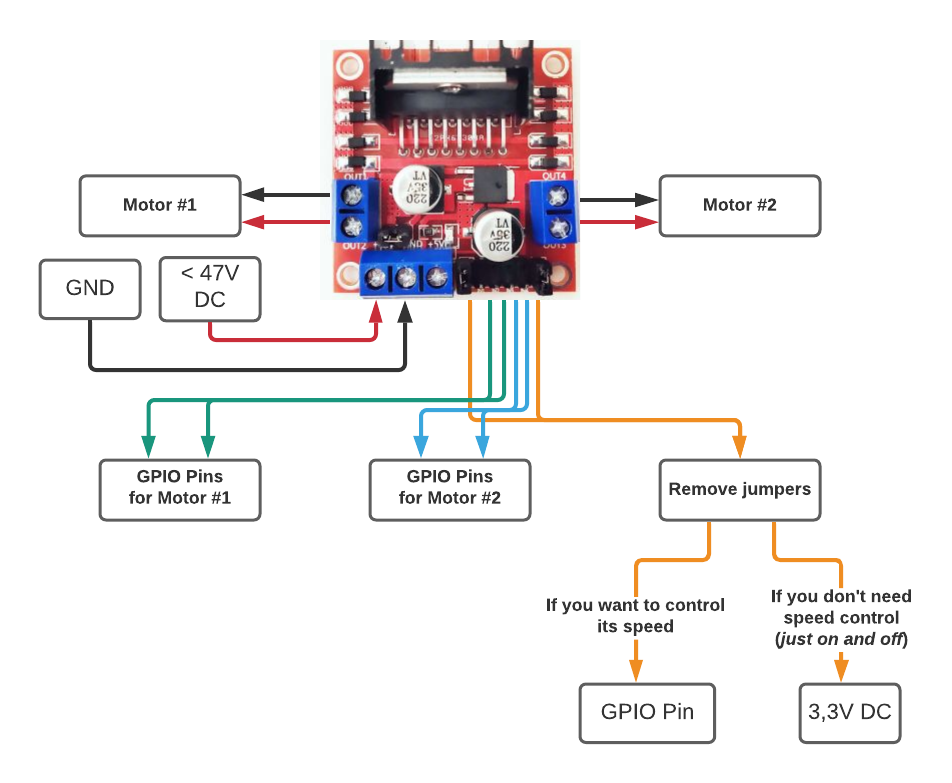
Power
VDD => 12V power supply (or any other voltage you need, as long as it is lower than 47V)
GND => ground
Connections to raspberry
IN1-IN4 => any free default gpio pin
ENA/ENB
remove jumpers
If you want to control the motor speed => connect to any free default gpio pin
Else => connect to 3.3V DC
Issues
Should be protected from high air humidity.
Else the driver will corrode over time!
If that is not possible => you would want to seal it by covering it with epoxy resin.